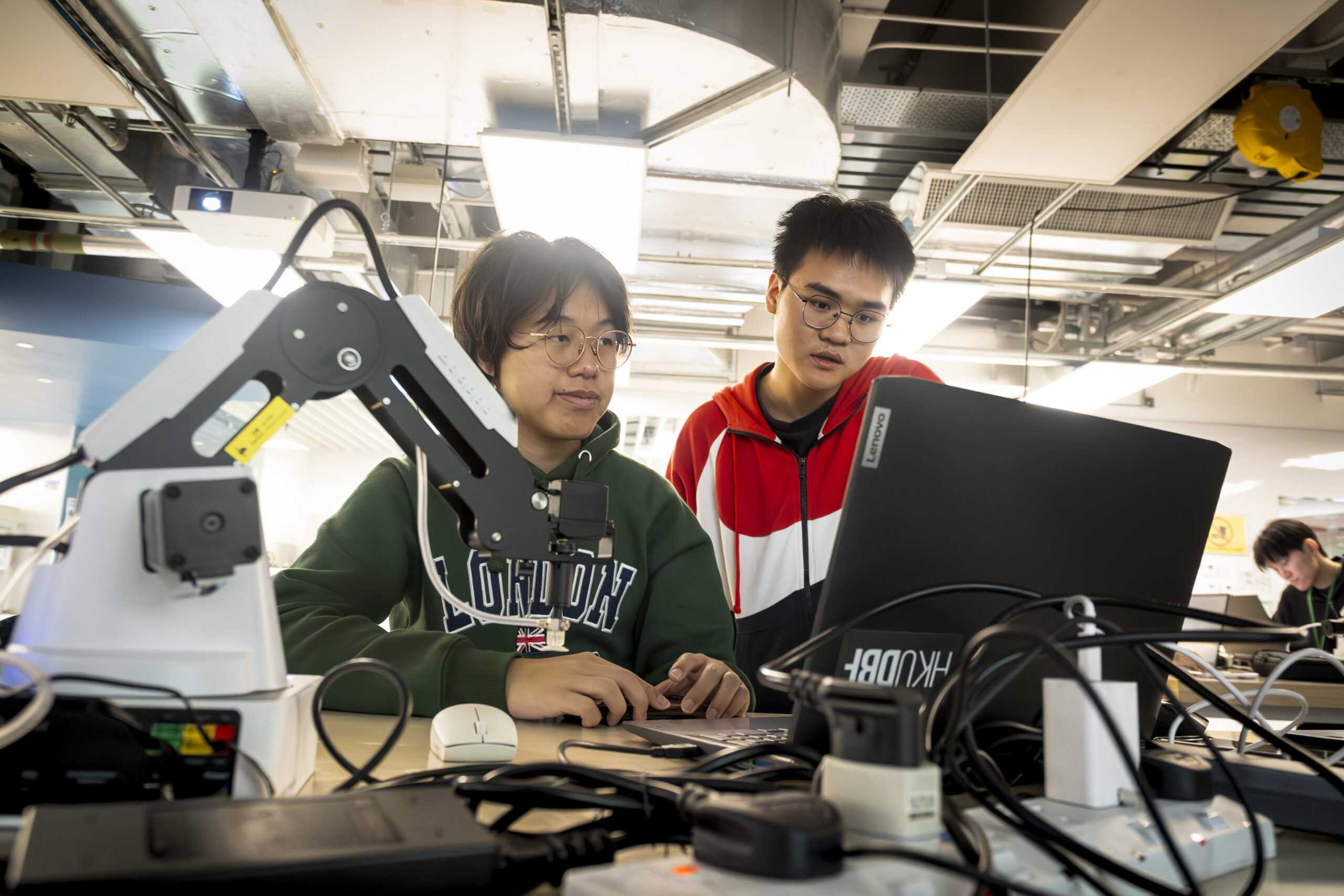
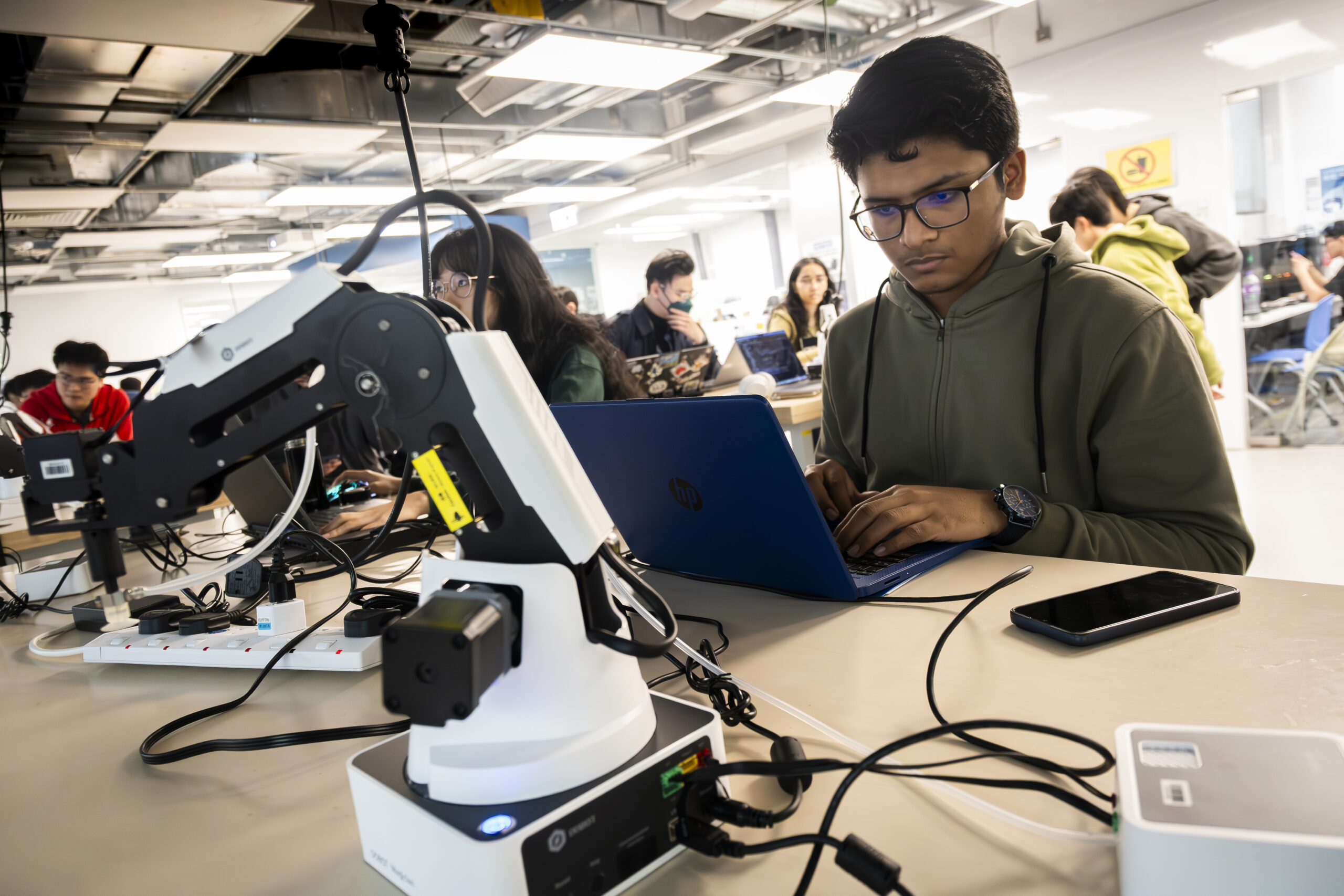
This workshop is designed to provide students with hands-on experience using an educational grade 4DOF robotic arm. Participants will learn the basics of Python programming for robotics, how to control the Dobot Magician, and fundamental concepts such as forward and inverse kinematics.
Date: September 10, 2025 (Wednesday)
Time: 11:00am – 1:00pm
Venue: Makerspace A, Tam Wing Fan Innovation Wing One, HKU
Learning Objectives:
- Learn how to use Python to control the Dobot Magician
- Understand the basic principles of robotics kinematics
- Be able to complete basic pick-and-place task
Prerequisites:
- Basic knowledge of Python programming
- Bring a laptop with the required software environment pre-installed (installation instructions will be provided soon)
Materials Provided (per group):


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}