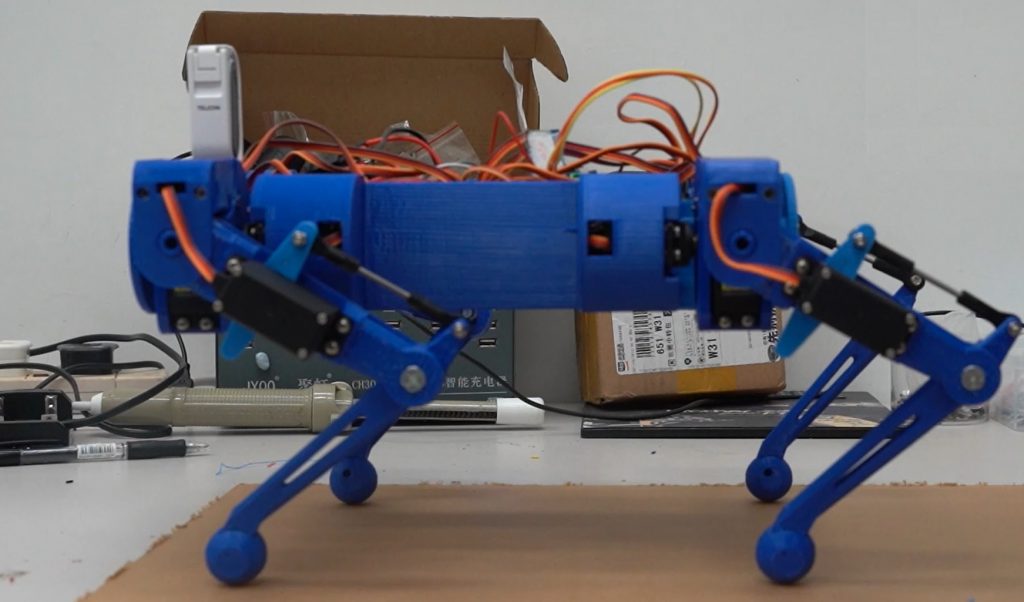
3D printed robot dog walking on terrain for STEM education
In this project, I made a robot dog for STEM education based on 3D printing and Arduino development kit. On top of this, I completed the integration of ESP32 and MPU6050, which gave the robot the ability of motion detection. Through the calculation of the motion data and the implemented PID control system, I completed a very good Self-Balance function. In addition, I also tried to apply the self-balance algorithm to the motion state which improves the motion posture and optimize the performance of the robot dog walking on certain terrain. Finally, I sorted out the problems encountered in the development process and some important principles into a document for STEM education, which can help others better understand and apply related content.
3D printed robot dog walking on terrain for STEM education Read More »