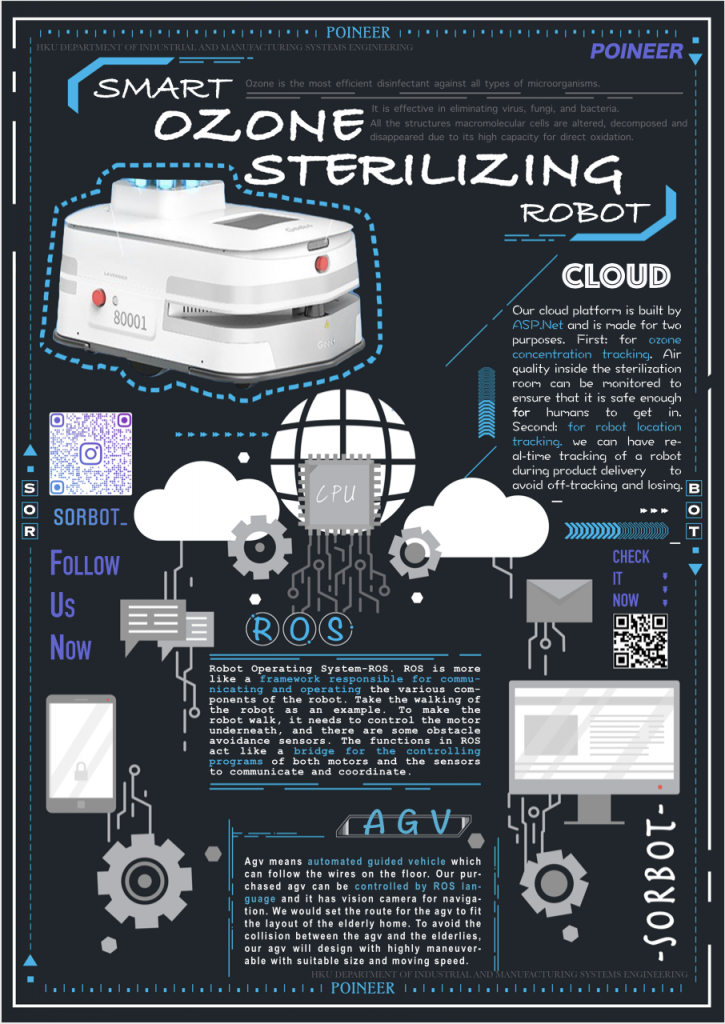
Smart Ozone Sterilizing Robot
Due to the outbreak of COVID 19 pandemic, over millions of people infected in foreign countries every day. To fight back the coronavirus, we are here to present our product – SORBOT. SORBOT is an ozone sterilizing robot combining AGV technology and ozone generator. Ozone is a non-polluting method to sterilize the air. Robot Operating System will act as a bridge for the controlling programs of both motors and the sensors to communicate and coordinate. Using both cloud and database platforms, we can provide an easy monitoring system for our customers to track the ozone concentration and robot inside a room area. We believed that it is beneficial to the public.
Smart Ozone Sterilizing Robot Read More »