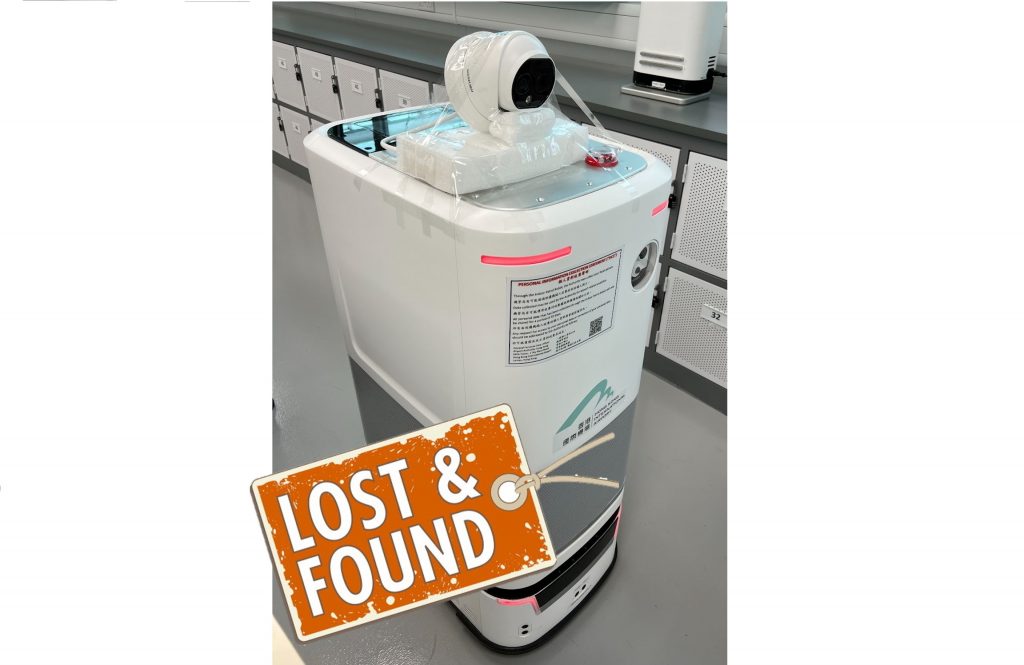
Smart Patrol Robot – Lost & Found
In this project, the goal is to develop the lost and found functionality of the patrol robot supplied by Airport Authority Hong Kong, where the robot patrols around designated areas and the camera of the robot will capture the surroundings. With object detection performed with an AI model, the robot will find lost items in the checkpoints and then store information of 2nd class objects, such as wallets, into a database. If lost belongings are found, the robot will report to the staff at the Hong Kong international Airport through a Telegram report channel and update a web portal which shows records of lost items.
Smart Patrol Robot – Lost & Found Read More »